
Penulis : Lucas E. Suryana, S.T., M.T.
Beberapa waktu lalu masyarakat Indonesia sempat dihebohkan oleh berita kecelakaan di jalan raya yang merenggut nyawa seorang pemimpin salah satu perusahaan waralaba terbesar di Indonesia. Setelah dilakukan penyelidikan, diketahui kalau pengendara kendaraan naas tersebut tertimpa truk yang berada di sampingnya ketika ia berusaha untuk menyalip truk tersebut lewat bahu jalan tol. Menurut pakar keselamatan berkendara, menyalip kendaraan lewat bahu jalan memang tidak dibenarkan karena merupakan titik buta bagi pengendara yang berada di kanannya.
Untuk mencegah kecelakaan seperti ini, perlu dilakukan tindakan mitigasi. Selah mitigasi yang dapat dilakukan adalah dengan meletakkan rambu dan lampu lalu lintas. Keberadaan rambu dan lampu lalu lintas di jalan raya dipercaya dapat memberikan ketertiban dan keamanan bagi pengguna jalan. Informasi berupa peringatan dan petunjuk jalan akan membantu pengendara untuk lebih berhati-hati pada saat berkemudi. Jika pengguna jalan was-was akan kondisi di sekitarnya, maka peluang terjadinya kecelakaan dapat diminimalkan.
Oleh karena itu, sangatlah penting untuk meletakkan rambu dan lampu lalu lintas pada lokasi yang tepat. Selain itu, keberadaannya juga perlu dimaintain. Informasi keberadaan benda dapat diperoleh dengan menggunakan Mobile Mapping System (MMS) yang mampu menangkap video dengan georeferensi. Dari video ini, rambu dan lampu lalu lintas ditandai satu per satu secara manual dengan menggunakan perangkat lunak khusus. Namun, prosedur manual ini memakan banyak waktu dan memerlukan ketelitian mata manusia. Untuk mempercepat proses penandaan ini, algoritme deteksi objek dengan menggunakan kecerdasan buatan dan informasi spasial dapat dimanfaatkan.

Gambar 1. Kendaraan MMS
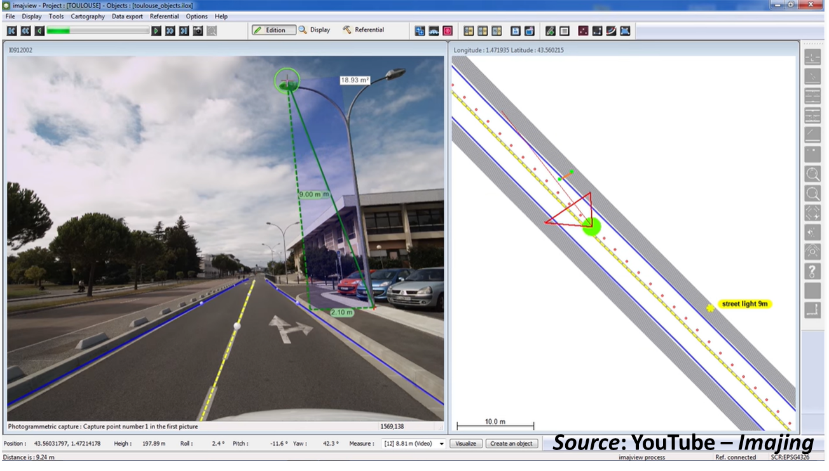
Gambar 2. Proses penandaan rambu dan lampu lalu lintas secara manual
Di dalam artikel ini, potensi penggunaan kecerdasan buatan untuk mengotomasi proses penandaan objek lalu lintas dengan biaya terjangkau akan ditunjukkan. Lokasi studi kasus yang akan digunakan adalah jalan yang berada di Puncak, Bogor. Data yang diperoleh selanjutnya akan ditampilkan di dalam suatu dasbor berbasis spasial. Berikut adalah outline dari proses penandaan objek:
- Pengambilan Data
- Pembuatan & Pengujian Model
- Dasbor spasial
- Kesimpulan
Pengambilan Data
Video dengan georeferensi diperoleh dengan menggunakan GoPro versi 7 yang diletakkan di dalam kendaraan pada saat berkendara di Puncak. GoPro versi ini memiliki kelebihan karena informasi data telemetri seperti gyroscope dan GPS dapat diekstrak untuk analisa video lebih lanjut. Jika dibandingkan dengan MMS, GoPro versi 7 ini memiliki harga jauh lebih murah.

Gambar 3. GoPro versi 7

Gambar 4. Tampilan video dengan georeferensi
Pembuatan dan Pengujian Model
Proses pembuatan model kecerdasan buatan untuk deteksi rambu dan lampu lalu lintas dilakukan dengan menggunakan TensorFlow, pustaka bahasa pemrograman Python untuk pembelajaran mesin. Sebelum dimasukkan ke dalam model, pertama-tama video dengan georeferensi dibagi per satuan waktu menjadi kumpulan foto. Selanjutnya, foto tersebut diberikan penandaan secara manual dan dibagi menjadi data uji dan data latih. Langkah terakhir yang perlu dilakukan adalah memasukkan semua data latih untuk dilatih di dalam model Tensorflow. Setiap rambu dan lampu lalu lintas yang sudah terdeteksi dari foto selanjutnya diambil informasi lokasinya.

Gambar 5. Proses penandaan foto

Gambar 6. Data uji dan latih

Gambar 7. Pelatihan model dengan TensorFlow
Dasbor Spasial
Setelah data uji dimasukkan ke dalam model, hasilnya dapat ditampilkan di dalam dasbor geospasial untuk memberikan intuisi secara lebih mendalam. Objek yang sudah terdeteksi ditampilkan dengan tiga buah pin berbeda. Pin berwarna merah, kuning dan biru secara berturut-turut menunjukkan lampu penerangan jalan, lampu lalu-lintas, dan rambu lalu-lintas. Gambar dari objek yang sudah dideteksi dapat diperoleh dengan mengarahkan kursor pada pin tertentu di dalam peta. Untuk mendapatkan informasi secara lebih baik, data tambahan seperti lokasi kecelakaan, kecepatan dan arah kendaraan dapat ditampilkan bersamaan dengan hasil deteksi objek.

Gambar 8. Dasbor spasial – deteksi objek
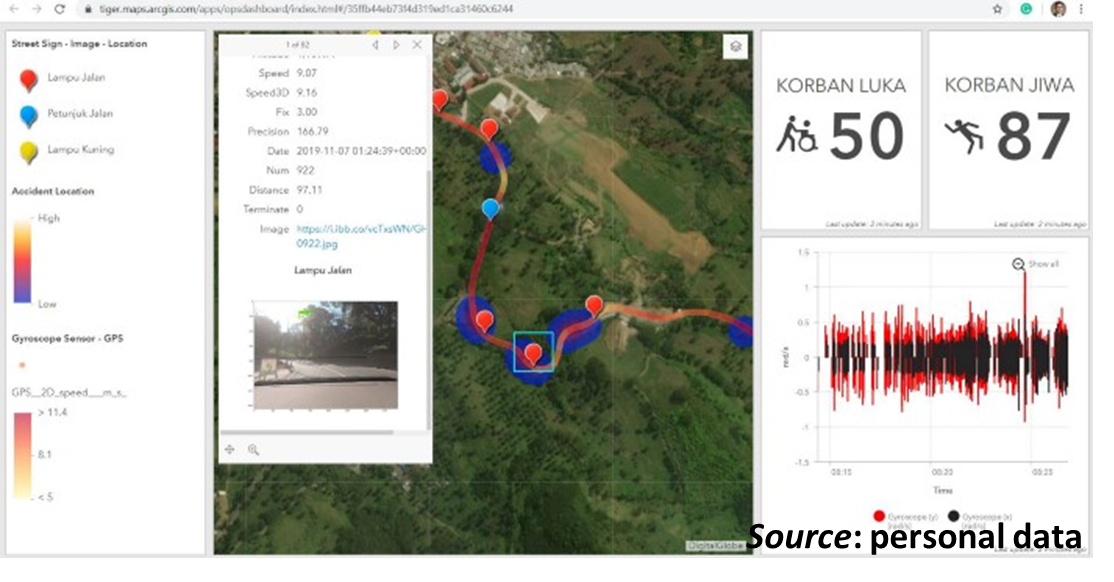
Gambar 9. Dasbor spasial – deteksi objek + data tambahan
Kesimpulan
Dengan menggunakan kecerdasan buatan untuk mendeteksi objek yang disertai dengan informasi spasial, maka proses penandaan pada MMS dapat diotomasi. Proses yang tadinya memakan waktu berjam-jam kini dapat dilakukan dalam waktu hitungan menit. Hal ini memberikan kepada kita suatu wawasan baru akan potensi yang dimiliki oleh kecerdasan buatan di dalam menggali informasi di dalam foto yang nilai informasinya dapat ditambah jika diberi informasi spasial.

